IKとは ?
![]()
![]()
IK(Inverse Kinematics)とは、ジョイントに対して
始点(IKルート)、終点(IKエンド) および目標点(IKゴール)を指定することで、屈伸運動などの姿勢補正を行える機能です。
IKはジョイント構造の先端を移動させたときに、その間のジョイントの回転を逆方向(親方向)にたどることで補正計算します。
キャラクタの足を地面に固定して腰を落として屈伸させたり、
階段を登る動作で軸足を動かさないようにして動かす場合などで使用できます。
IKの機能は、以下の3種類が存在します。
- 選択ジョイントから指定の親のジョイント間を単純に補正する



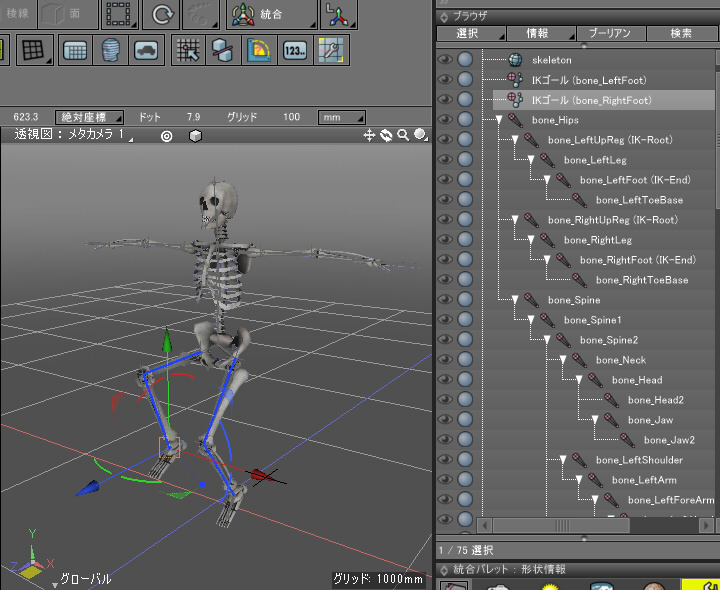
- ボーンやボールジョイントを使用したときに、IKルート/IKエンド/IKゴールを指定する
- スマートキネマティクス
下の動画は、ボーンに対してIKルート/IKエンド/IKゴールを指定して操作している例になります。